20200206_robots
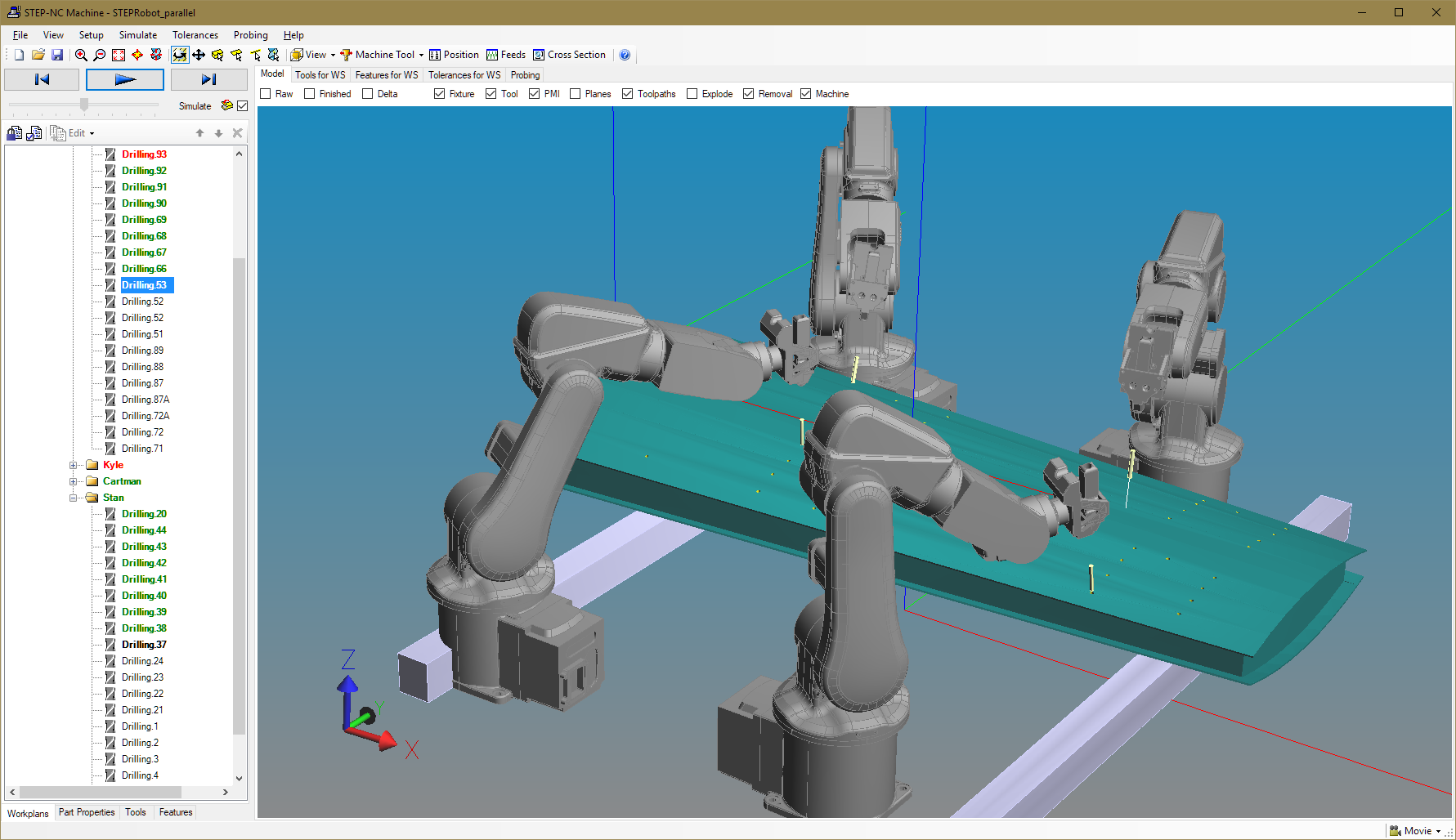
File: STEPRobot_parallel.stpnc Size: 1mb, 12k instances AP238 file, STEP-NC DLL File Created: 2019-06-12 Image Created: 2020-02-06 Parallel robot drilling, demonstrated at the University of Washington BARC Lab with Robots Kenny, Kyle, Stan & Cartman. Assembled into an AP238 data set via the STEP-NC DLL using machining process data from ABB Robot Studio and AP242 and AP214 product geometry from Catia, NX, SolidWorks, and other systems. 11 product models and assembly components for workpiece, rawpiece, fixtures, in-process shape, tool assemblies and end-effectors, 80 hole features and 80 drilling operations over four parallel workplans.